Over the last few years, I’ve been making replacement parts for the Backmann Mainline split chassis locomotives. These consisted of replacement axles and the fastenings that hold the chassis halves together. However some of the locomotives also suffer from another problem, although not as common, and in this post, I’ll share with you my fix.
The Bachmann Mainline 4MT, with the split chassis, as shown below, is a great loco and a reliable runner, even by modern standards. But apart from the axle and chassis fastening issues, it sometimes also has issues with the actual wheels.

The wheels are cast metal so as to pick up power, but have a plastic insert for the detail.

The issue with these is the plastic sometimes starts to deform and spring out of the wheel. Looking at the main drive axle below you can see the plastic wheel center on the left is sticking out a lot. It’s supposed to be flush with the face of the wheel. This causes a problem because the connecting rods fit over the spigot, which you can see, and will hit the deformed plastic as the wheel rotates. This then jams up the connecting rods and valve gear which will cause the axles to crack; that’s probably what happened to this locomotive.

The plastic center will pop out. Because it fits into the wheel and is located by the spigot passing through it, they are not usually glued in place. I think they’re press-fitted, and eventually the force of the metal wheel combined with expansion and compression due to heat changes, causes the plastic to deform.

The counterweight, which balances the wheel against the offset connecting rods, is also molded on the plastic center but not on the wheel. I originally thought this was done so the same wheel could be used everywhere but actually, the center wheelset has a longer spigot to receive the connecting rods, main rod, and eccentric rod, which are held on with a pin, whereas the other wheels have a smaller spigot just for the connecting rod, which is held on with a screw.
The plastic inserts are also different as the counterweight is different. A center wheel, as shown on the left, has a larger counterweight as the main rod connects here as well as the connecting rods.

What surprised me is the counterweight is not centered under the spigot. The spigot is between two spokes but the counterweight spans an odd number of spokes meaning it’s not directly opposite the spigot. I did wonder if this was a mistake in the injection mold?
If you look at the image below of GWR Saint Class 2935 ‘Caynham Court’ the counterweights, big and small, span an even number of spokes and are centered under the spigot.

But an actual photo of a 4-6-0 Standard 4Mt, number 75078, shows the counterweights spanning odd numbers of spokes and offset, just like the model. Looks like Bachmann Mainline knew what they were doing.

As to why the counterweight is located like this I did a bit of research and found a document titled ‘Steam Locomotive Rail Wheel Dynamics Part 2: Mechanical Balancing of Steam Locomotives‘. It’s based on US locomotives but the principles are the same, I believe it’s to do with cross counterbalancing. Page six in the document says:
“Due to the fact that the rotating parts of the locomotive are not in the same vertical plane as the driving wheels, where the counterweights were located an additional imbalance was introduced by the counterbalancing material. Also known as “dynamic balancing” in the US, cross counterbalancing was developed to mitigate these forces. This required an additional small counterbalance weight to be placed in the opposite wheel to balance the near wheel on each wheelset. In practice, it usually meant additional weights were placed on the wheel roughly halfway between the crank pin and the counterweight, a location that is ultimately determined by calculation. In some engines, the cross counterbalance weight was combined with the main counterbalance weight, the total weight and location being determined by calculation.”
So that means the plastic wheel centers will be the same on both sides of the locomotive, not mirrored and for the 4-6-0 I would need two with large counterweights and four with small.
The rear of the plastic insert needs to be flat, but as you can see by the way the original curls on a flat surface it is now deformed even when free of the wheel.

Getting measurements from the metal wheel and original plastic part I was able to draw the new insert. 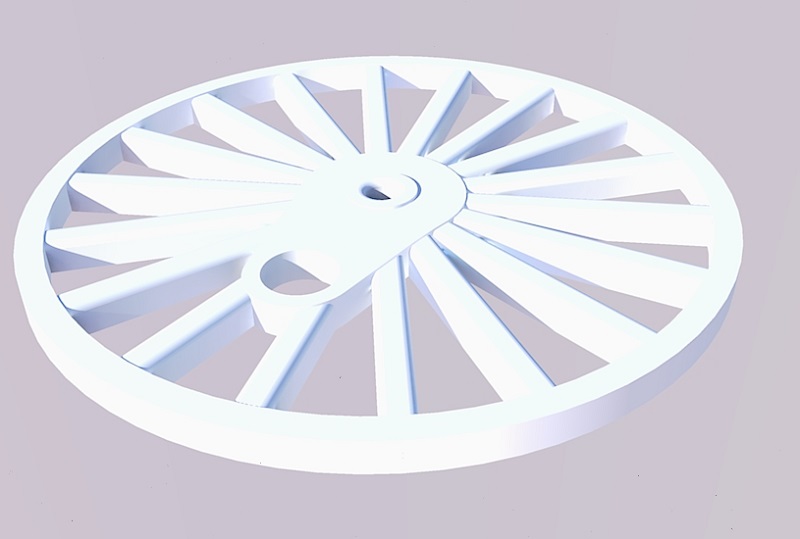
The two different counterweights were added.

And a set of six made ready for printing. The face of the wheels will be printed facing upwards to get the best possible finish as this will be the only side visible.
 These will be 3D printed in Shapeways Smooth Fine Detail Plastic and when they arrive I’ll share them with you. There are several Bachmann Mainline locomotives that have this type of wheel insert and there are all sorts of sizes. Once I know this replacement part for the 4-6-0 4MT works I can make sets for other locomotives. If you have one with this issue, let me know via the contacts page and I will try and do that loco first.
These will be 3D printed in Shapeways Smooth Fine Detail Plastic and when they arrive I’ll share them with you. There are several Bachmann Mainline locomotives that have this type of wheel insert and there are all sorts of sizes. Once I know this replacement part for the 4-6-0 4MT works I can make sets for other locomotives. If you have one with this issue, let me know via the contacts page and I will try and do that loco first.

















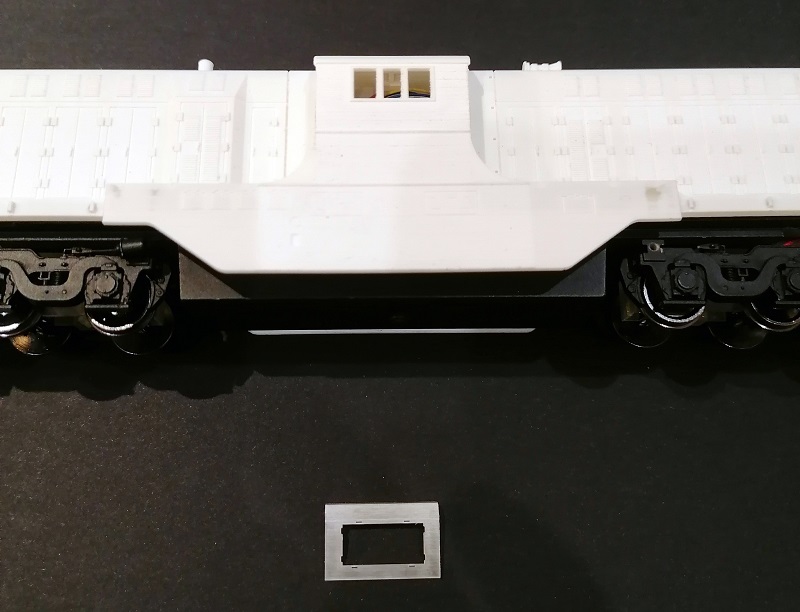
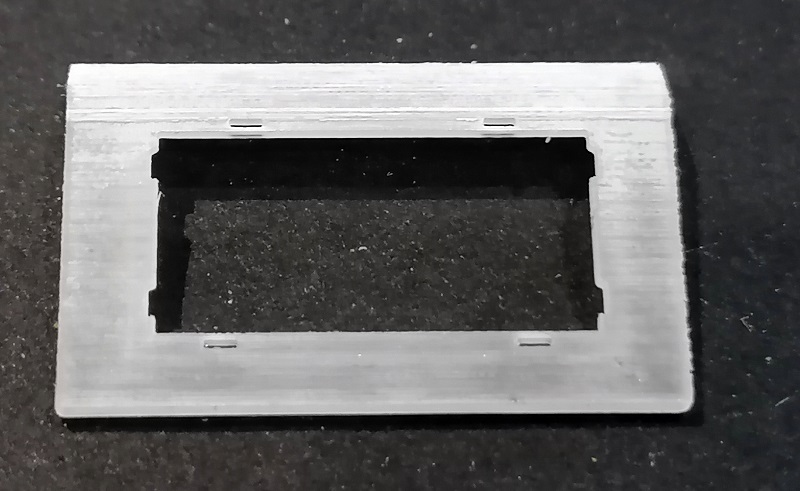
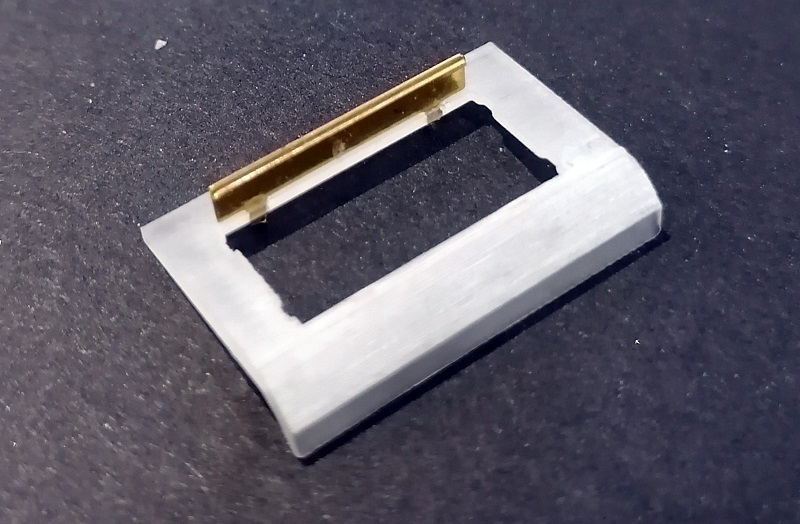
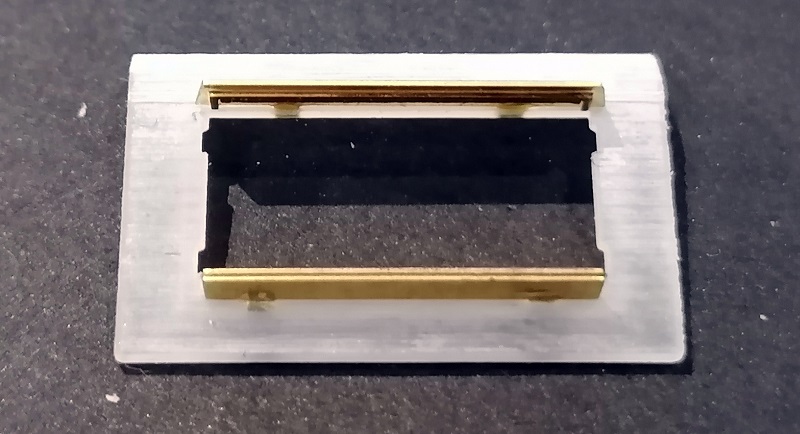
 To make this design work the shell has a different window configuration, with slots to receive the etched brass on all sides and nothing in the middle.
To make this design work the shell has a different window configuration, with slots to receive the etched brass on all sides and nothing in the middle.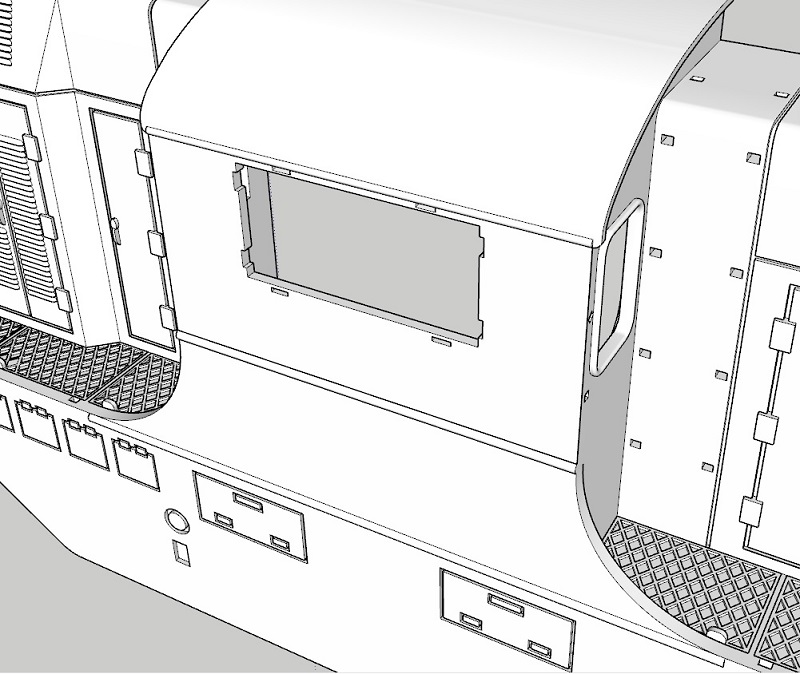







You must be logged in to post a comment.