
Recently I have been working on a British outline OO layout which had some working semaphore signals. Sadly some of these signals had suffered some electrical damage which rendered their control circuit boards inoperative. In this post I will be sharing with you a few simple methods of repairing Dapol semaphore signals.
The Dapol semaphores, as shown below, are nice looking signals and have a fairly basic drive system which is self contained in the tube below the signal. Above ground there is a nicely detailed rectangular post with the rotating arm on top. The arm is connected via a crank to a push-rod that runs down behind the post. You will be able to see this in some later photos. The glass lenses in the end of the arm are transparent and a small LED shines through creating the correct color.

Below ground is where all the clever parts are. Interestingly the drive system on these OO signals is also used for their N Scale signals; Dapol have simply changed the size of the signal on top. In the large threaded tube at the bottom of the signal is a circuit board, electric motor, gear rack and worm gear. After the large nut has been removed there is a tiny screw at the base of the signal which holds the two halves of the tube together. Once that has been removed the tube can be separated.
The motor is in the left half and the circuit board is in the right. You can also see the push-rod that runs up behind the signal pole in front of the ladder. And if we zoom in you can see below the push-rod is a spring. This spring is attached to the push-rod and when it’s moved up and down the signal arm moves up and down.

The two pairs of metal contacts are part of the circuit board; as the motor spins the worm gear it drives the rack either up or down pushing the rod. A spigot sticking out of the rack touches one of the pairs of contacts creating a circuit and telling the circuit board that the rack is at the end of its travel. However as the circuit board is damaged these are of no concern to us.
As new, the signals work by providing 16v AC power to the red and black wires. This powers the circuit board and the LED at the top of the signal pole. Then by simply touching the two yellow wires together, using a momentary Push-To-Make switch, the signal will change. Even when you let go of the switch the motor will keep going untill the rack gets to the end of its travel.
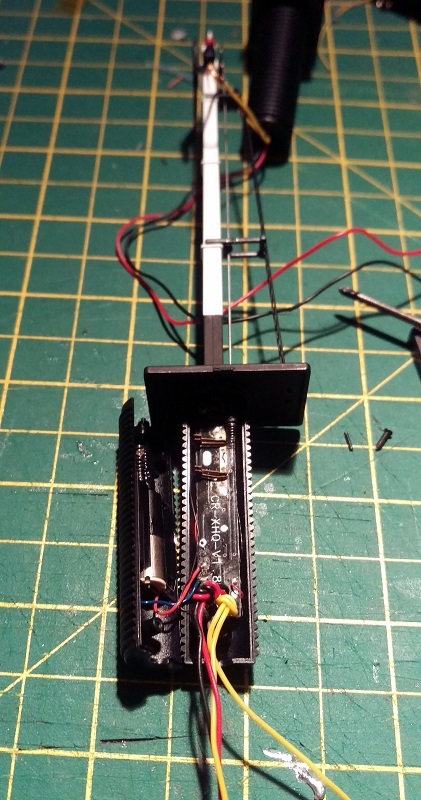
On the first of the two damaged signals only the motor drive function was inoperable, the light still worked when 16v AC power was applied, so the circuit board was still producing low voltage DC which is also needed to drive the motor. In the picture below you can see the wire connections. The red and blue are the DC feed to the motor. The tiny red and, hard to see just above the yellow, tiny black are the LED feed that run up inside the signal pole. The big red and black are the 16v AC power in and the yellows are the activators.

So to fix this signal I removed the motor wires from the circuit board and extended them by soldering on some more wire and heat shrinking the joint.

Then I removed the yellow activator wires from the circuit board and added a pair of wires to the LED feed connection points.

The signal was then reassembled with the new wires coming out of the bottom.
The next step was to take the low voltage DC power, coming from the new blue and green wires, out to the layout control panel. Then, using a momentary double pole double throw (DPDT) switch, return the power to the motor wires, in positive or negative, to make the motor go one way or the other. The DPDT switches I use are toggle switches as shown below.

These have six connections on the bottom. When it is thrown one way it joins the middle pair to the top pair and the other way joins the middle pair to the bottom pair.
So, if the incoming low voltage DC power is connected to the bottom pair, then reversed and connected to the top pair, throwing the switch one way or the other will reverse the DC power.

The motor is then connected to the middle pair of terminals, not shown above, and the signal can be manually controlled. My apologies as I got a bit carried away with the work and so didn’t take any more photos of this particular signal. As the switch is a momentary, when you let go it springs back to the middle and stops the motor. There’s no danger of pushing the motor too far as when the rack gets to the end of its travel it simply stops, although the motor keeps spinning. The spring on the end of the push-rod, and there is another one on the bottom of the rack, supply just enough pressure to make the rack re-engage with the worm gear when you want it to run the other way.
This fix, although functional, is not ideal as you are still relying on a damaged circuit board and all the small parts inside the tube. Plus you have to hold the switch untill the signal has reached its position.
The second fix I have for these signals is a bit moire drastic but I think in the long run is a more durable solution.
The second signal’s motor and circuit board had failed so I removed all of the parts from inside the tube. Sadly the LED had also blown on this particular signal so the wires for that will go as well.

As all the points on this layout are powered with Seep point motors it made sense to power the signal in the same way. Seep make a special point motor with a latching spring which is designed to work with hand-built points that don’t have a latching spring of their own. The latching spring means the motor will stay in the required position even though the spring on the push-rod will be pushing back. This latching point motor was mounted to a ‘Tee’ shaped mount as shown below.

There is a slot for the motor throw bar to pass through and the large hole above the throw bar is for the signal tube.

You can see the latching spring under the motor cross-bar.

As the tube on the bottom of the signal was now empty it could be reduced in length; this was also necessary so it didn’t hit the throw bar. The last thing to do was to connect the throw bar to the signal push-rod. However there is a problem in that the point motor movement is more than the signal needs, and as the point motors are powered by Capacitor Discharge Units the motor bangs over very hard which will damage the signal.
To counteract this I made a very basic omega ring out of thin nickel rod. One end was superglued into the spring on the bottom of the push-rod, the other was looped around the motor throw bar.

Although basic, this omega ring absorbs the sudden shock from the point motor as well as any extra movement while still supplying enough force to move the push-rod. The two shorter tube halves were glued together and the ‘Tee’ mount was screwed to the underside of the layout. The signal was then put though the hole in the layout and mount. Before the large nut was tightened up the signal could be tilted to one side to alow the omega ring end to be slid over the point motor throw bar. Once tightened up the omega ring could not slide off the throw bar, but as an extra measure I glued a small washer onto the end of the rod.
This second fix was a lot better because the signal changed quickly with a single touch of the switch and any wiring is the same as a standard point motor.
These signals have also been modified in a similar way with servo motors which gave a very nice smooth action and this might be something I will try next time. If I do I will share it with you.

You must be logged in to post a comment.