Kato makes some fantastic N scale locomotives and they run very well, that is until they don’t. In this post, I’ll share with you the three most common issues I find as to why these reliable locomotives stop working.
There are of course typical things such as dirty wheels and track, but the three issues I’m sharing with you take a little bit more to fix. They’re also common on other brands of locomotives that have similar parts.
The first issue has become apparent on this Kato SD40-2, as shown below. This model was custom painted by Paul Begg. This is a 6-axle locomotive that picks up the power on all 12 wheels. The power is transferred to the chassis halves via copper strips and then into the circuit board.

With the shell removed you can see the circuit board. This particular locomotive is DCC fitted with a Digitrax DCC drop-in decoder, but I’ve had the same issue with DC versions.

The circuit board or decoder drops into the chassis and pushes forward which clamps it in place and at the same time makes electrical contact with the chassis halves and motor contacts. Below, you can see the decoder has slid back exposing the electrical contacts at the front.

Close up you can see the electrical contacts, and the slots in the chassis halves they slide into. Ideally, this should be a tight fit requiring a little force to push the decoder forward. The friction then prevents the decoder from moving and ensures good electrical contact. But sometimes the decoder is a loose fit; this may because the DCC decoder is ever-so-slightly thinner than the original circuit board or maybe the chassis has been affected by the pressure of clamping the decoder. The consequence is the decoder slides in and out easily, and the electrical contact is very poor.

The electrical contacts or pads on the decoder are copper, which is ideal to solder too, so to fix this issue I flash over the pads with a soldering iron to put a thin layer of solder on top.

The layer of solder can’t be too thick, otherwise, it’ll prevent the decoder from fitting at all. To get a thin layer I first use the iron to put some solder on, then I clean the iron tip on a wet sponge and quickly run it over the pad again. Excess solder will be removed on the iron, leaving a thin flat surface. This may take one or two passes with a clean tip each time.

The decoder can then be pressed in. It will take a good press as the pads are now thicker, but if it feels like you need to press too hard, rather than risk breaking the decoder, pass a clean iron over the pads again to remove a little more solder.
Once fitted the decoder should not move and you’ll have a solid connection, because the solder is softer than the copper and the chassis will dig into it.

The second issue I see a lot is to do with the actual pickups in the trucks. The AC4400CWs below, again custom painted by Paul Begg, suffered from this. The first fix above has already been done. This is one of the older chassis where the chassis screws need to be loosened slightly to release the truck.

With the truck bottom, and side frames unclipped the pickups will fall out. Each wheelset has a plastic axle and metal wheels with a spike on the outside of the wheel. The spike fits into the cone of the brass pickup.
The issue is dirt and crud that builds up inside the cup. Below you can see two pickups from the same truck. I’ve cleaned the cups on the lower one.

To clean these cups I use tiny cotton swabs dipped in Isopropyl alcohol. These fit perfectly into the cups to clean them out. Another alternative is a small Philips/positive drive screwdriver of a similar size. One note about using Isopropyl alcohol to clean contacts: if they’re from a 3D printed truck, clean the Isopropyl alcohol off fully before refitting the pickup because 3D printed materials and Isopropyl alcohol don’t mix very well.

As well as cleaning the cups the wheel spike should also be cleaned and for this, I use a regular cotton bud dipped in Isopropyl alcohol.
The last issue is also to do with trucks and is something I’ve come across several times. Below is another SD40-2. The decoder is not loose in the chassis and the pickup cups are clean, and as you can see below it’s receiving power as the light is on.

However, if the front truck is lifted off the track the power stops.

Lifting only the rear truck shows the power returns so one or both sides of the rear truck is not working correctly.

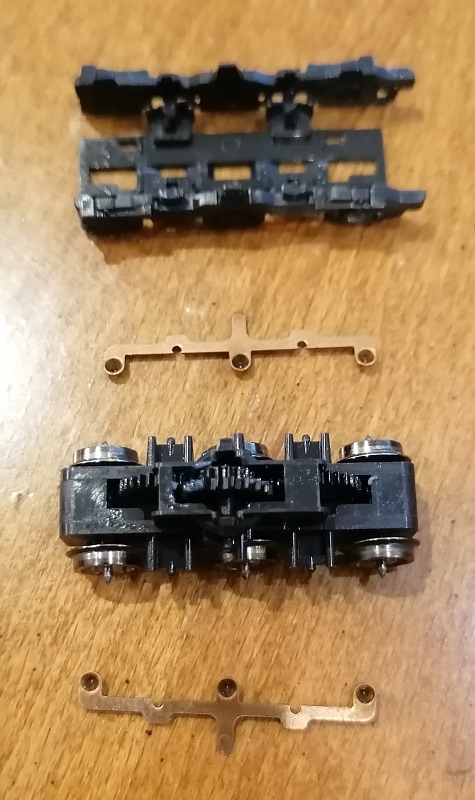
This is one of the newer Kato chassis and the trucks simply pull out and clip back in. When removing the trucks the drive shaft will also fall out, so be extra careful not to lose the bearing on the end of the worm gear as they will also fall off. Should it fall off note that there is a tiny plastic washer between the bearing and the worm gear.

With the truck removed the problem becomes apparent; you can just about see it in the image above but it’s clearer below. The righthand pickup, with the cups in, has a post that stands up to make contact with the chassis copper strips and it’s bent.
 Compared to the one on the other side you can see it’s pointing towards the truck rather than up. This will prevent making contact with the copper strip and reducing the locomotives pickup by half on that side. The solution is to bend it back into the right place and this can be done with a pair of tweezers or small needle nose pliers.
Compared to the one on the other side you can see it’s pointing towards the truck rather than up. This will prevent making contact with the copper strip and reducing the locomotives pickup by half on that side. The solution is to bend it back into the right place and this can be done with a pair of tweezers or small needle nose pliers.

Now with the truck reinserted in the chassis, the locomotive should work with either truck on the track. And with both trucks picking up power, clean pickup cups and a good connection to the decoder, the locomotive should run as well as new.
Clean wheels are also important, and a little lubricant on the gears is also a good idea while you have the trucks out. If you’re wondering what oils or lubricants to use on the gears I’ve written a post about that which can be found here.

You must be logged in to post a comment.